




സി/എൽ/യു ടൈപ്പ് ഡ്യുവൽ ആക്സിസ് സെർവോ പൊസിഷനർ
സാങ്കേതിക പാരാമീറ്ററുകൾ
| സി-ടൈപ്പ് ഡബിൾ-ആക്സിസ് സെർവോ പൊസിഷനർ | എൽ-ടൈപ്പ് ഡബിൾ-ആക്സിസ് സെർവോ പൊസിഷനർ | യു-ടൈപ്പ് ഡബിൾ-ആക്സിസ് സെർവോ പൊസിഷനർ | |||||||||||
| സീരിയൽ നമ്പർ | പദ്ധതികൾ | പാരാമീറ്റർ | പാരാമീറ്റർ | പാരാമീറ്റർ | പരാമർശങ്ങൾ | പാരാമീറ്റർ | പാരാമീറ്റർ | പാരാമീറ്റർ | പരാമർശങ്ങൾ | പാരാമീറ്റർ | പാരാമീറ്റർ | പാരാമീറ്റർ | പരാമർശങ്ങൾ |
| 1 | റേറ്റുചെയ്ത ലോഡ് | 200 കിലോ |
500 കിലോ | 1000 കിലോ | രണ്ടാമത്തെ അച്ചുതണ്ടിന്റെ R400mm/R400mm /R600mm ആരത്തിനുള്ളിൽ | 500 കിലോ | 1000 കിലോ | 2000 കിലോ | രണ്ടാമത്തെ അച്ചുതണ്ടിന്റെ R400mm/R600mm /R800mm ആരത്തിനുള്ളിൽ | 1000 കിലോ | 3000 കിലോഗ്രാം | 5000 കിലോഗ്രാം | രണ്ടാമത്തെ അച്ചുതണ്ടിന്റെ R600mm/R1500mm /R2000mm ആരത്തിനുള്ളിൽ |
| 2 | ഗൈറേഷന്റെ സ്റ്റാൻഡേർഡ് ആരം | R400 മി.മീ | R400 മി.മീ | R600 മി.മീ |
| R400 മി.മീ | R600 മി.മീ | R800 മി.മീ |
| R600 മി.മീ | R1500 മി.മീ | R2000 മി.മീ |
|
| 3 | ആദ്യ അക്ഷ ഫ്ലിപ്പ് ആംഗിൾ | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | രണ്ടാമത്തെ അക്ഷ ഭ്രമണ കോൺ | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | ആദ്യ അച്ചുതണ്ടിന്റെ റേറ്റുചെയ്ത മുകളിലേക്കുള്ള തിരിവ് വേഗത | 50°/സെ. | 50°/സെ. | 15°/സെ. |
| 50°/സെ. | 50°/സെ. | 17°/സെ. |
| 17°/സെ. | 17°/സെ. | 17°/സെ. |
|
| 6 | രണ്ടാമത്തെ അച്ചുതണ്ടിന്റെ റേറ്റുചെയ്ത ഭ്രമണ വേഗത | 70°/സെ. | 70°/സെ. | 70°/സെ. |
| 70°/സെ. | 70°/സെ. | 17°/സെ. |
| 24°/സെ. | 17°/സെ. | 24°/സെ. |
|
| 7 | സ്ഥാനനിർണ്ണയ കൃത്യത ആവർത്തിക്കുക | ±0.10മിമി | ±0.15 മിമി | ±0.20മിമി |
| ±0.10മിമി | ±0.10മിമി | 17°/സെ. |
| ±0.15 മിമി | ±0.20മിമി | ±0.25 മിമി |
|
| 8 | ഡിസ്പ്ലേസ്മെന്റ് ഫ്രെയിമിന്റെ ബൗണ്ടറി മാനങ്ങൾ (നീളം×വീതി×ഉയരം) | 1200 മിമി × 600 മിമി × 70 മിമി | 1600 മിമി × 800 മിമി × 90 മിമി | 2000 മിമി × 1200 മിമി × 90 മിമി |
| - | - | - |
| - | - | - |
|
| 9 | പൊസിഷൻ ഷിഫ്റ്ററിന്റെ മൊത്തത്തിലുള്ള അളവ് (നീളം×വീതി×ഉയരം) | 2000 മിമി × 1100 മിമി × 1700 മിമി | 2300 മിമി × 1200 മിമി × 1900 മിമി | 2700 മിമി × 1500 മിമി × 2200 മിമി |
| 1500 മിമി × 500 മിമി × 850 മിമി | 2000 മിമി × 750 മിമി × 1200 മിമി | 2400 മിമി × 900 മിമി × 1600 മിമി |
| 4200 മിമി × 700 മിമി × 1800 മിമി | 5500 മിമി × 900 മിമി × 2200 മിമി | 6500 മിമി × 1200 മിമി × 2600 മിമി |
|
| 10 | സ്റ്റാൻഡേർഡ് ടു-ആക്സിസ് റോട്ടറി പ്ലേറ്റ് | - | - | - | - | Φ800 മിമി | Φ1200 മിമി | Φ1500 മിമി |
| Φ1500 മിമി | Φ1800 മിമി | Φ2000 മിമി |
|
| 11 | ആദ്യ അക്ഷ ഭ്രമണത്തിന്റെ മധ്യ ഉയരം
| 1200 മി.മീ | 1350 മി.മീ | 1600 മി.മീ |
| 550 മി.മീ | 800 മി.മീ | 1000 മി.മീ |
| 1500 മി.മീ | 1750 മി.മീ | 2200 മി.മീ |
|
| 12 | വൈദ്യുതി വിതരണ വ്യവസ്ഥകൾ | ത്രീ-ഫേസ് 200V±10%50HZ | ത്രീ-ഫേസ് 200V±10%50HZ | ത്രീ-ഫേസ് 200V±10%50HZ | ഐസൊലേഷൻ ട്രാൻസ്ഫോർമർ ഉപയോഗിച്ച് | ത്രീ-ഫേസ് 200V±10%50HZ | ത്രീ-ഫേസ് 200V±10%50HZ | ത്രീ-ഫേസ് 200V±10%50HZ | ഐസൊലേഷൻ ട്രാൻസ്ഫോർമർ ഉപയോഗിച്ച് | ത്രീ-ഫേസ് 200V±10%50HZ | ത്രീ-ഫേസ് 200V±10%50HZ | ത്രീ-ഫേസ് 200V±10%50HZ | ഐസൊലേഷൻ ട്രാൻസ്ഫോർമർ ഉപയോഗിച്ച് |
| 13 | ഇൻസുലേഷൻ ക്ലാസ് | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | ഉപകരണങ്ങളുടെ ആകെ ഭാരം | ഏകദേശം 800 കിലോ | ഏകദേശം 1300 കിലോ | ഏകദേശം 2000 കിലോ |
| ഏകദേശം 900 കിലോ | ഏകദേശം 1600 കി.ഗ്രാം | ഏകദേശം 2500 കിലോ |
| ഏകദേശം 2200 കിലോ | ഏകദേശം 4000 കിലോ | ഏകദേശം 6000 കിലോ | |
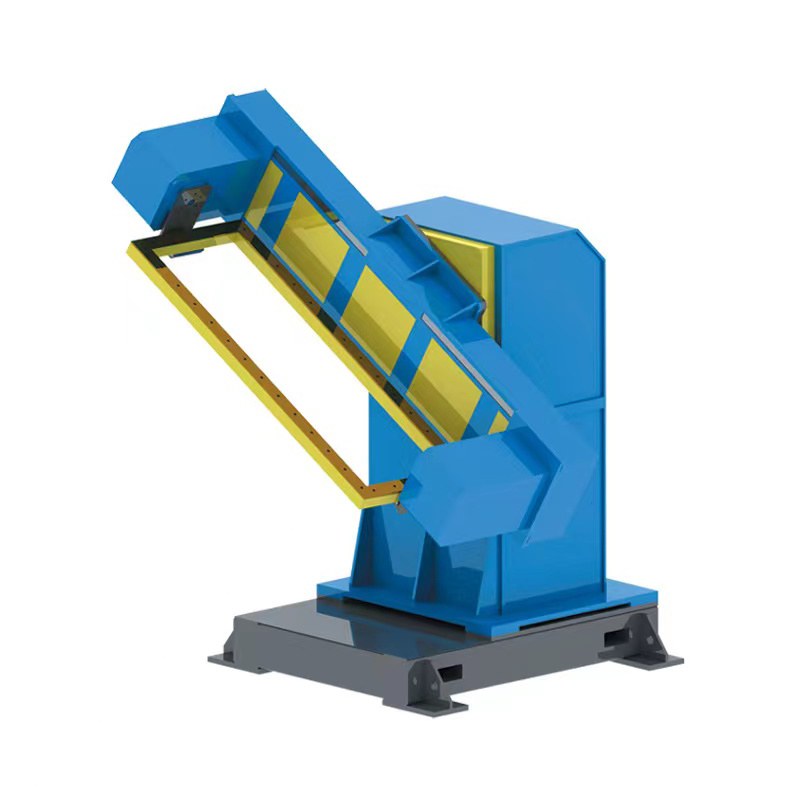
സി-ടൈപ്പ് ഡബിൾ-ആക്സിസ് സെർവോ പൊസിഷനർ
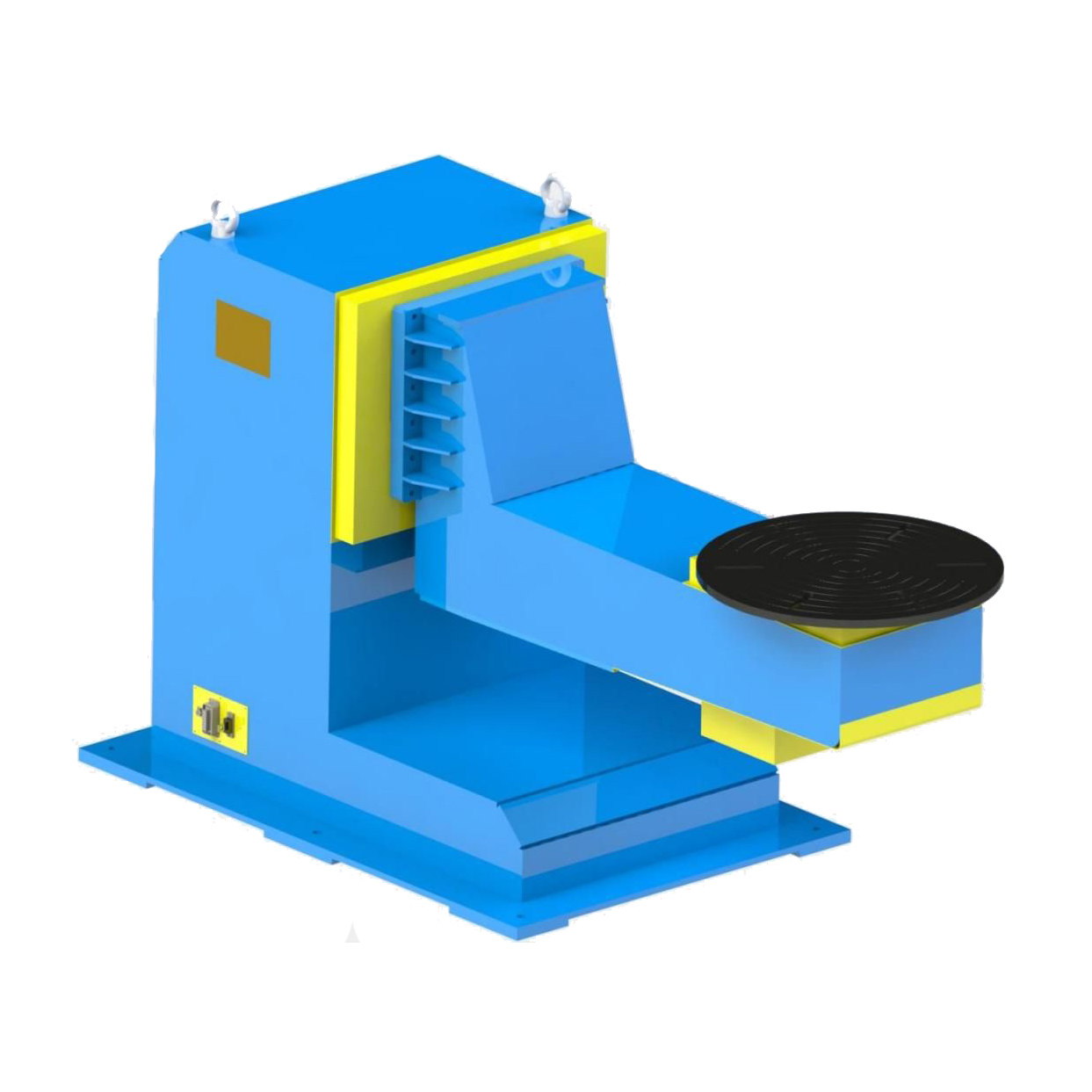
എൽ-ടൈപ്പ് ഡബിൾ-ആക്സിസ് സെർവോ പൊസിഷനർ

യു-ടൈപ്പ് ഡബിൾ-ആക്സിസ് സെർവോ പൊസിഷനർ
ഘടന ആമുഖം
ഡ്യുവൽ ആക്സിസ് സെർവോ പൊസിഷനറിൽ പ്രധാനമായും വെൽഡഡ് ഇന്റഗ്രൽ ഫ്രെയിം, വെൽഡിംഗ് ഡിസ്പ്ലേസ്മെന്റ് ഫ്രെയിം, എസി സെർവോ മോട്ടോർ, ആർവി പ്രിസിഷൻ റിഡ്യൂസർ, റോട്ടറി സപ്പോർട്ട്, കണ്ടക്റ്റീവ് മെക്കാനിസം, പ്രൊട്ടക്റ്റീവ് ഷീൽഡ്, ഇലക്ട്രിക്കൽ കൺട്രോൾ സിസ്റ്റം എന്നിവ ഉൾപ്പെടുന്നു. വെൽഡഡ് ഇന്റഗ്രൽ ഫ്രെയിം ഉയർന്ന നിലവാരമുള്ള പ്രൊഫൈലുകൾ ഉപയോഗിച്ച് വെൽഡ് ചെയ്തിരിക്കുന്നു. അനീലിംഗിനും സ്ട്രെസ് റിലീവിംഗിനും ശേഷം, കീ പൊസിഷനുകളുടെ ഉയർന്ന മെഷീനിംഗ് കൃത്യതയും കൃത്യതയും ഉറപ്പാക്കാൻ പ്രൊഫഷണൽ മെഷീനിംഗ് ഉപയോഗിച്ച് ഇത് പ്രോസസ്സ് ചെയ്യണം. ഉപരിതലത്തിൽ ആന്റി-റസ്റ്റ് അപ്പിയറൻസ് പെയിന്റ് സ്പ്രേ ചെയ്തിട്ടുണ്ട്, ഇത് മനോഹരവും ഉദാരവുമാണ്, കൂടാതെ ഉപഭോക്തൃ ആവശ്യങ്ങൾക്കനുസരിച്ച് നിറം ഇഷ്ടാനുസൃതമാക്കാനും കഴിയും.
വെൽഡിഡ് ഡിസ്പ്ലേസ്മെന്റ് ഫ്രെയിം ഉയർന്ന നിലവാരമുള്ള പ്രൊഫൈൽ സ്റ്റീൽ ഉപയോഗിച്ച് വെൽഡ് ചെയ്ത് മോൾഡ് ചെയ്ത് പ്രൊഫഷണൽ മെഷീനിംഗ് ഉപയോഗിച്ച് പ്രോസസ്സ് ചെയ്യണം. പൊസിഷനിംഗ് ടൂളിംഗ് മൗണ്ടിംഗിനായി സ്റ്റാൻഡേർഡ് സ്ക്രൂ ഹോളുകൾ ഉപയോഗിച്ച് ഉപരിതലം മെഷീൻ ചെയ്യണം, പെയിന്റിംഗ്, കറുപ്പിക്കൽ, തുരുമ്പ് പ്രതിരോധ ചികിത്സ എന്നിവ നടത്തണം.
പ്രൊഫഷണൽ മെക്കാനിക്കൽ പ്രോസസ്സിംഗിന് ശേഷം റോട്ടറി പ്ലാറ്റ്ഫോം ഉയർന്ന നിലവാരമുള്ള പ്രൊഫൈൽ സ്റ്റീൽ തിരഞ്ഞെടുക്കുന്നു, കൂടാതെ പൊസിഷനിംഗ് ടൂളിംഗ് മൗണ്ടുചെയ്യുന്നതിനായി സ്റ്റാൻഡേർഡ് സ്ക്രൂ ഹോളുകൾ ഉപയോഗിച്ച് ഉപരിതലം മെഷീൻ ചെയ്യുന്നു, കൂടാതെ കറുപ്പിക്കൽ, തുരുമ്പ് പ്രതിരോധ ചികിത്സ എന്നിവ നടത്തണം.
പവർ മെക്കാനിസമായി എസി സെർവോ മോട്ടോറും ആർവി റിഡ്യൂസറും തിരഞ്ഞെടുക്കുന്നത് ഭ്രമണത്തിന്റെ സ്ഥിരത, സ്ഥാനനിർണ്ണയത്തിന്റെ കൃത്യത, ദീർഘായുസ്സ്, കുറഞ്ഞ പരാജയ നിരക്ക് എന്നിവ ഉറപ്പാക്കും. ചാലക സംവിധാനം പിച്ചള കൊണ്ടാണ് നിർമ്മിച്ചിരിക്കുന്നത്, ഇതിന് നല്ല ചാലക ഫലമുണ്ട്. ചാലക അടിത്തറ ഇന്റഗ്രൽ ഇൻസുലേഷൻ സ്വീകരിക്കുന്നു, ഇത് സെർവോ മോട്ടോർ, റോബോട്ട്, വെൽഡിംഗ് പവർ സ്രോതസ്സ് എന്നിവയെ ഫലപ്രദമായി സംരക്ഷിക്കും.
സ്ഥിരമായ പ്രകടനവും കുറഞ്ഞ പരാജയ നിരക്കും ഉള്ള പൊസിഷനർ നിയന്ത്രിക്കുന്നതിന് ഇലക്ട്രിക് കൺട്രോൾ സിസ്റ്റം ജാപ്പനീസ് ഒമ്രോൺ പിഎൽസി സ്വീകരിക്കുന്നു. ഉപയോഗത്തിന്റെ ഗുണനിലവാരവും സ്ഥിരതയും ഉറപ്പാക്കാൻ സ്വദേശത്തും വിദേശത്തുമുള്ള പ്രശസ്ത ബ്രാൻഡുകളിൽ നിന്നാണ് ഇലക്ട്രിക്കൽ ഘടകങ്ങൾ തിരഞ്ഞെടുക്കുന്നത്.











